





-
Robolab中文教程之导航者指南(第三节)
当你感觉能够胜任导航者 2 之后,你可以按 BACK 键,退出. 双击 PILOT3 进入导航者 3.
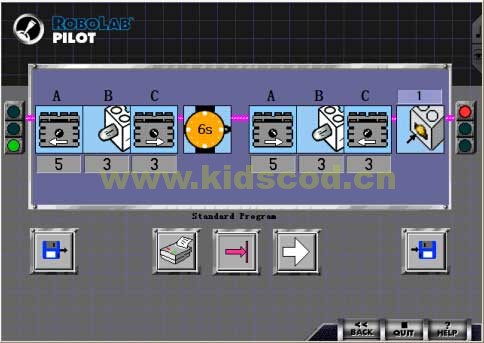
可以发现这里面的功能模块和图标更多了。同样,它是由绿灯开始,红灯结束;默认程序内容为:开始时,马达A以动量级别5左转、灯B以动量级别3亮、马达C以动量级别3右转,6S后,马达A、C以相同的能量反转,灯B不变,当端口1的触动传感器被按下时,程序停止。

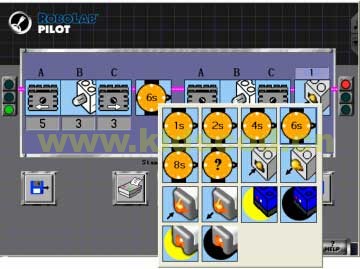
在这个级别中,我们打开等待条件(如下图) ,我们第一次接触到光感,其实光感是一个发射率传感器,小红灯发射出光线,另一个接收,光感得到的是 接 收 的 比 率 ( 从0-100%) ,当然接收的光线包含了反射光和自然光。在这里,图中黄色区域中左边的图标是表示增大5%以上,右边的图标表示减少 5%以上。







最新更新
nodejs爬虫
Python正则表达式完全指南
爬取豆瓣Top250图书数据
shp 地图文件批量添加字段
爬虫小试牛刀(爬取学校通知公告)
【python基础】函数-初识函数
【python基础】函数-返回值
HTTP请求:requests模块基础使用必知必会
Python初学者友好丨详解参数传递类型
如何有效管理爬虫流量?
2个场景实例讲解GaussDB(DWS)基表统计信息估
常用的 SQL Server 关键字及其含义
动手分析SQL Server中的事务中使用的锁
openGauss内核分析:SQL by pass & 经典执行
一招教你如何高效批量导入与更新数据
天天写SQL,这些神奇的特性你知道吗?
openGauss内核分析:执行计划生成
[IM002]Navicat ODBC驱动器管理器 未发现数据
初入Sql Server 之 存储过程的简单使用
SQL Server -- 解决存储过程传入参数作为s
JavaScript判断两个数组相等的四类方法
js如何操作video标签
React实战--利用甘特图和看板,强化Paas平
【记录】正则替换的偏方
前端下载 Blob 类型整理
抽象语法树AST必知必会
关于JS定时器的整理
JS中使用Promise.all控制所有的异步请求都完
js中字符串的方法
import-local执行流程与node模块路径解析流程


